|
|||||
|
Главная
 Теория и практика судебной экспертизыАвтотехническая экспертизаТишин Б. М. Особенности кинематики поворота колёсных машин с шарнирно-ломающейся рамой Теория и практика судебной экспертизыАвтотехническая экспертизаТишин Б. М. Особенности кинематики поворота колёсных машин с шарнирно-ломающейся рамой
| |||||
|
| |||||
Б. М. Тишин, доцент по кафедре тракторы и автомобили, кандидат технических наук, член некоммерческой организации Ассоциация Судебных Экспертов «Автоправо» (г. Смоленск)
Показаны особенности кинематики поворота колёсных машин с шарнирно-ломающейся рамой. В результате поворота задней полурамы вокруг соединительного шарнира возникает смещение вектора суммарной скорости колёс задней полурамы и появление нового кинематического центра задней полурамы, увеличивающего или уменьшающего кинематический радиус поворота в зависимости от входа в поворот или выхода из поворота. Это делает управляемость при входе в поворот недостаточной и при выходе из поворота – избыточной. Ключевые слова: кинематика поворота; шарнирно-ломающаяся рама; кинематический центр поворота; управляемость; трактор К-700; полурама; векторы скоростей колёс.
Т 47 ББК 67.52 УДК 343.983.25 ГРНТИ 10.85.31 Код ВАК 12.00.12
Features of the kinematics of the rotation of wheeled vehicles with a hinged-breaking frame
Tishin B. M., Associate Professor at the Department of Tractors and Automobiles, candidate of technical sciences, member of the non-profit organization Association of Forensic Experts "Avtopravo" (city Smolensk) The features of the kinematics of the rotation of wheeled vehicles with a hinged-breaking frame are shown. As a result of the rotation of the rear semi-frame around the connecting hinge, a displacement of the vector of the total speed of the wheels of the rear semi-frame occurs and the appearance of a new kinematic center of the rear semi-frame, which increases or decreases the kinematic turning radius depending on the entrance to the turn or exit from the turn. This makes the controllability when entering a turn insufficient and when exiting a turn – excessive. Keywords: kinematics of turn; hinged-breaking frame; kinematic center of rotation; controllability; tractor K-700; semi-frame; wheel speed vectors. _____________________________________
С принятием Постановления ЦК КПСС и Совета Министров СССР от 27 марта 1954 года «Об увеличении производства зерна в 1954–1955 г.г. за счёт освоения целинных и залежных земель», в севообороте пахотных земель прибавилось более 13 миллионов га. Львиная доля прибавки пахотных земель пришлась на Северо-Казахстанскую область; часть – на Западно-Казахстанскую область. В 1954 году на освоение целины было направлено 120 тысяч из 137 всего произведённых тракторов, 10 тысяч из 37 тысяч комбайнов и 100 тысяч автомобилей. Здесь не даётся оценка действий партии и Правительства по поднятию целины. Правильно это было или нет? Не вдаваясь в анализ справедливости данной стратегии, изложим события, являющиеся следствием этого Постановления и связанные с созданием принципиально нового направления в хозяйствовании страны – увеличение энергонасыщенности тракторов и широкий захват сельскохозяйственных орудий и транспортного машиностроения. Самым распространённым сельскохозяйственным трактором на тот период считался гусеничный трактор ДТ-54 (ДТ-54А), выпускавшийся с 1949 года по 1963 год Сталинградским тракторным заводом, в этот же период, с 1949 по 1961 год – Харьковским тракторным заводом, и с 1952 года по 1979 год – Алтайским тракторным заводом, построенным в г. Рубцовске после эвакуации первых двух заводов на Алтай во время Великой Отечественной войны. Этот трактор относился к классу тяги 3т и в первые же годы поднятия целины для решения поставленных задач возникла необходимость в создании более мощного трактора класса тяги 5т. Осенью 1959 года Н. С. Хрущеву, который был с визитом в США, показали мощный колесный трактор фирмы John Deere. Глава КПСС и Советского правительства не только оценил его, но и тут же, по возвращению, поставил задачу организовать в СССР производство принципиально новых энергонасыщенных скоростных тракторов общего назначения мощностью более 200–220 л.с. с широким шлейфом навесных и прицепных орудий. Действительно, таких машин в нашей стране тогда не выпускали, а они требовались. Для решения этой задачи были в США закуплены как образцы тракторы John Deere 410, Wagner WA 14, Gaterpillar. Разработка нового трактора была поручена ленинградскому Кировскому заводу. Новый трактор получил индексацию К-700. Как и многие другие виды техники в СССР, в годы «холодной войны», К-700 разрабатывался как продукция двойного назначения: в военное время его предполагалось использовать как артиллерийский тягач, в мирное время – как тяговый сельскохозяйственный трактор класса тяги 5т. Производство новой машины, получившей название «Кировец», было так же организовано на Кировском заводе в Ленинграде – старейшем тракторостроительном предприятии СССР. Особенностью нового трактора была шарнирно-сочленённая (ломающаяся) рама, состоящая из двух полурам, соединённых между собой двойным (горизонтальным и вертикальным) шарниром. Он позволяет полурамам поворачиваться одна относительно другой в горизонтальной (до 30–40°) и вертикальной (до 18°) плоскостях. Такая конструкция рамы позволяет управлять движением трактора не поворотом колес, а относительным поворотом полурам вокруг вертикального шарнира, соединяющего полурамы. Горизонтальный шарнир позволяет ходовой части приспосабливаться к рельефу дороги. Благодаря чему рама не нагружается скручивающими усилиями при движении трактора по неровностям. К корпусу двойного шарнира крепят рычаги гидравлических цилиндров рулевого управления. Каждая полурама жёстко без подвески опирается на передний и задний мосты. По сравнению с тракторами с передними управляемыми колесами тракторы с шарнирно-сочленёнными рамами имеют меньший радиус разворота и, соответственно, обладают большей маневренностью. Тягач с шарнирно сочленённой рамой лучше приспособлен для маневрирования, чем тягачи с передними управляемыми колёсами. Кроме того, у таких тягачей задние по ходу колеса могут двигаться полностью или частично по следам впереди идущих колес, что улучшает проходимость машин в трудных дорожных условиях. Перекрытие следов колёс полурам тем полнее, чем ближе к серединеколесной базы размещён сочленяющий полурамы шкворень. Анализ совместной кинематики передней и задней полурамы строится на том, что точка сцепки полурам принадлежит одновременно как передней полураме, так и задней полураме, и их траектории в этом месте должны совпадать. Основная масса колесных тракторов с шаринирно-ломающейся рамой скомпонована по схеме 4х4 (с передним и задним ведущими мостами), причём, в большинстве случаев задний мост – отключаемый. Как правило, на передних мостах установлены дифференциалы повышенного трения, а на задних ‒ блокируемые. На всех машинах используются конечные передачи, выполненные в виде планетарных редукторов. У большинства моделей планетарный редуктор находится в колесе. Исключение составляет продукция фирмы Caterpillar, у которой бортовой редуктор находится на выходе из дифференциала и с помощью длинных полуосей связан с колесами. В числе практически неизученных оставались вопросы, связанные с исследованием влияния на управляемость и устойчивость направления движения конструктивных и эксплуатационных параметров колесного трактора с шарнирной рамой. Вопросы управляемости и устойчивости движения обычно всегда рассматривались только применительно к автомобилям, так как скорости движения тракторов были незначительны. В связи с повышением рабочих скоростей машинно-тракторных агрегатов до 30÷40 км/час на транспортных работах, их исследование стало необходимостью. Исследования устойчивости движения тракторов проводились, в основном, при наличии крюковой нагрузки, являющейся специфической особенностью данных машин. Исследования по вопросам динамики, управляемости и устойчивости движения сельскохозяйственных тракторов и машинно-тракторных агрегатов на их базе выполнены советскими учёными В. П. Горячкиным, П. М. Василенко, В. Н. Болтинским, Д. А. Чудаковым, В. Ф. Коноваловым, Л. В. Гячевым, А. Б. Лурье, Я. Г. Фаробиным и рядом других авторов, труды которых были учтены при разработке новой модели. На основе работ Л. В. Гячева задняя полурама рассматривается как своего рода физический маятник, совершающий движение под действием сил сопротивления рабочих органов в горизонтальной плоскости и на склоне, с учётом упругих реакций шин. На необходимость установления правильных соотношений между действующими на машины силами, с одной стороны, и их массами, скоростями и режимами работы ‒ с другой, указывал академик В. П. Горячкин. Предложенную им теорию масс и скоростей машин можно рассматривать как одну из первых попыток отыскания оптимальных соотношений между механическими параметрами машин и скоростными режимами их работы. Вопросы теории движения тракторов и машинно-тракторных агрегатов, как объектов систем автоматического регулирования и управления, рассмотрены в работах А. Б. Лурье, О. В. Маргвелашвили и ряда других авторов. Управляемость колёсных тракторов в зависимости от конструктивных и эксплуатационных факторов была исследована в работах В. Ф. Коновалова, П. А. Морозова, Г. Я. Чернова, В. М. Горового. Широкое применение в народном хозяйстве шарнирно-сочленённых машин и агрегатов на их базе, являющихся сложными многозвенными динамическими системами и обладающими, как замечено из практики их вождения, пониженной устойчивостью, потребовало решения ряда вопросов, связанных со стабилизацией движения. Теоретические и экспериментальные исследования управляемости и устойчивости движения шарнирно-сочленённых специальных машин были представлены работами Е. Ю. Малиновского и М. Гайцгори, С. Ф. Маршака, В. Н. Архангельского и В. Ф. Неврова, Х. Ж. Као, А. М. Кочнева и ряда других авторов. Наиболее значительной работой в этой области является монография Е. Ю. Малиновского, в которой обобщены результаты теоретических и экспериментальных исследований устойчивости движения, как отдельно взятых шарнирно-сочленённых машин, так и транспортных поездов на их базе. Им были впервые введены в расчётную схему динамики шарнирно-сочленённой машины упругая связь между её полурамами, моделирующую гидропривод механизма складывания, представив её в виде пружины с круговой жёсткостью «С». Однако в дальнейшем делалась предпосылка о том, что численная величина этой жёсткости значительно превосходит жёсткость других упругих элементов системы и рама машины считается абсолютно жёсткой. Теоретические исследования управляемости и устойчивости направления движения тракторов и машинно-тракторных агрегатов на их базе, как правило, характеризуются рассмотрением лишь их плоскопараллельного движения, без анализа влияния на эти показатели пространственных колебаний звеньев машины. Условия управляемости и устойчивости движения определяются по критерию Рауса-Гурвица. Исходя из найденных условий управляемости и устойчивости движения, определяются параметры гидропривода механизма складывания, обеспечивающие необходимую скорость выхода трактора на заданную траекторию. Под управляемостью колёсной машины в теории понимают возможность следования машины по траектории, задаваемой рулевым управлением и задних колёс по траектории передних колёс. На тракторах (тягачах) с шарнирно-ломающейся рамой второе условие исполняется расположением вертикального шарнира на середине колёсной базы машины. А вот первое условие связано как с кинематическими, так и динамическими показателями, возникающими в процессе движения, особенно на повороте. Первый трактор К-700 покинул сборочный цех и вышел на поля страны 13 июля 1962 года. Массовое серийное производство К-700 было развёрнуто в 1969 году. Автор настоящей статьи в 1963 году был студентом пятого курса Ленинградского политехнического института и был направлен на преддипломную практику на этот завод в проектное бюро, которое занималось разработкой трактора К-701 с гидромеханической трансмиссией и планетарной коробкой передач Зотова, вместо коробки передач постоянного зацепления Мадорского, установленной на опытных образцах трактора К-700. Удивительной особенностью разрабатываемой линейки тракторов было применение шарнирно-ломающейся рамы, вместо трапеции Жанто для управления колёсных тракторов с передними управляемыми колёсами. Этот способ позволял колёсному трактору иметь все колёса одинакового размера, и для осуществления поворота в компоновке трактора не надо было предусматривать свободное пространство для разворота колёс. Среди недостатков новой и разрабатываемой модели трактора специалисты того времени отмечали несколько моментов. 1. В условиях крайне значительных неровностей дорожного покрытия и высокого расположения центра масс, было возможно опрокидывание машины. 2. Выступающий вперёд двигатель ухудшал проходимость и видимость в экстремальных условиях. 3. Агрономы требовали машины с меньшим давлением на грунт, так как по колее трактора на 2–3 года снижалась урожайность сельскохозяйственных культур почти на 50 %. 4. Обслуживание трактора вне специализированных мастерских было крайне затруднительно из-за невозможности даже руками достать вспомогательные механизмы, расположенные на двигателе. К достоинствам трактора следует отнести скопированный с покупных в США тракторов John Deere 410, Wagner WA 14, Gaterpillar способ осуществления поворота, не имеющий аналога в отечественном тракторостроении – шарнирно-ломающуюся раму. Кинематика поворота. Чтобы колёсный трактор или автомобиль двигался на повороте без бокового скольжения, оси всех колес должны пересекаться в одной точке «0» – кинематическом центре поворота. Для обеспечения этого условия наибольшее распространение получили две схемы поворота с передними управляемыми колесами и с шарнирно-сочленённой (ломающейся) рамой. Есть ещё способ поворота: установлением разности скоростей по бортам машины, но он больше применяется на гусеничных машинах.
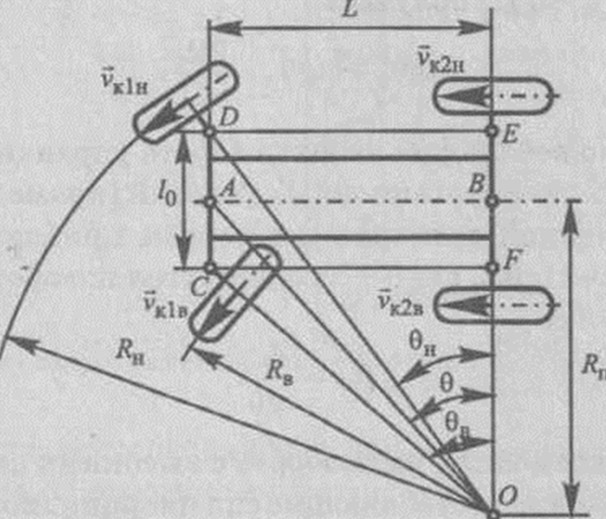
Рис. 1. Кинематическая схема поворота колёсного трактора с передними управляемыми колесами с трапецией Жанто: L – колёсная база; Rн – радиус поворота по наружнему колесу; Rв – радиус поворота по внутреннему колесу; Ɵ – углы поворота радиусов;Rn – радиус поворота кинематического центра – середины заднего моста (точка В);l0 – расстояние между шарнирами рулевой трапеции; 0 – кинематический центр поворота[1]
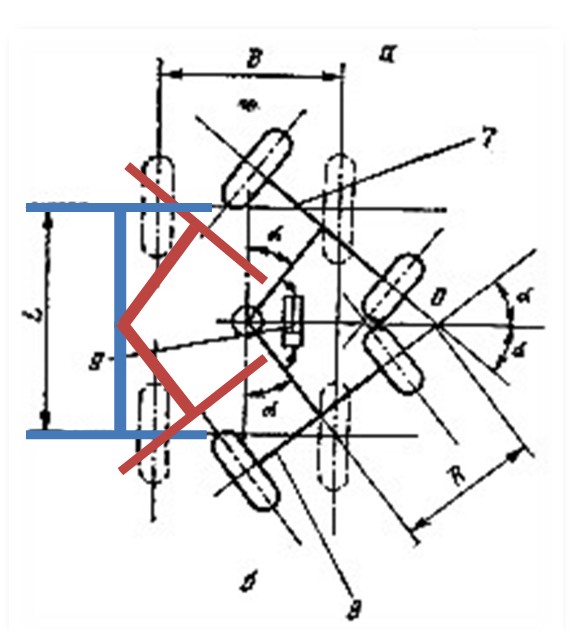
Рис 2. Кинематическая схема поворота колесного трактора с шарнирно-ломающейся рамой. L – колёсная база трактора; В – колея трактора; R – радиус поворота кинематической точки трактора (центра заднего моста). l-1, l-2 – длины первой и второй полурамы; g – силовой механизм слома рамы; α – угол слома полурамы
Как видно из приведённых схем (рис. 1, 2), в обоих способах поворота тракторы при постоянном радиусе поворота поворачивают вокруг кинематического центра поворота «0», располагающегося на продолжении линий осей переднего и заднего мостов трактора. При этом считается, что колёса не имеют боковой эластичности, то есть – абсолютно жёсткие, на которые не учитывается воздействие внутренних и внешних сил. Однако исследования показали, что при повороте тягача с шарнирно-ломающейся рамой невозможно не учитывать внешние силы, действующие на колёса, так как в процессе поворота происходит не разворот колёс вокруг своих осей, а перемещение колёс при сломе рамы вместе с ней, которое происходит с параметрами, близкими к параметрам торможения, то есть сопровождается юзом. И тогда при составлении векторов скоростей колёс следует учитывать и силы, вызывающие премещение полурам относительно вертикального шарнира. В момент перемещения полурам появляется новый кинематический центр, вокруг которого будет поворачивать только задняя полурама, так как при принятом распределении масс тягача передняя полурама, обладающая большей массой и сопротивлением перемещению рулевым управлением назад, не будет иметь такого смещения, как задняя полурама, так как происходит перемещение передней полурамы против движения машины и попутно для задней полурамы. И только при выходе из поворота возможно изменение угла слома рамы подталкиванием передней полурамы, а для задней – против движения. Для того чтобы колеса передней и задней оси катились по одной колее, необходимо, чтобы длины полурам были равными. 1. При классической схеме компоновки трактора двигатель и коробка передач располагаются на передней полураме. Поэтому при прямолинейном движении наиболее тяжёлая передняя полурама двигается вперёд и при начале поворота для её слома необходимо преодолеть сопротивление движению вперёд передней полурамы и потянуть её назад. Задняя полурама является менее нагруженной и подтягивание полурамы для её слома является попутным. Следовательно, при сломе рамы для задней полурамы необходимо приложить меньшее усилие. Поэтому в процессе слома рамы задняя полурама будет подтягиваться к передней. 2. В процессе поворота, когда колёса передней рамы катятся по криволинейной траектории, векторы скоростей колёс направленны перпендикулярно к линии переднего моста. Криволинейная траектория образуется за счёт изменения угла слома рамы задней полурамой. 3. При уже образовавшемся мгновенном угле слома рамы, каждое из колёс задней полурамы находится в двух движениях: вдоль плоскости колеса – по перпендикуляру к линии заднего моста, и перпендикулярно линии, соединяющей каждое колесо задней оси с шарниром слома рамы, так как вся полурама при сломе рамы обкатывается вокруг вертикального шарнира. При этом, второе движение возникает только при работающем силовом механизме слома рамы или при горизонтальных колебаниях задней полурамы, в пределах зазоров в шарнире и гидроприводе. Рассморим кинематические схемы движений колес трактора: Передняя полурама При более тяжёлой передней полураме траектория поворота машины в целом образуется углом слома задней полурамы. Поэтому при любом угле слома рамы передняя полурама определяет направление движения, вращаясь вокруг мгновенного центра поворота 01, образованного углом слома рамы, задняя полурама подтягивается к передней (рис. 3). В процессе изменения угла слома рамы трактор двигается по переходной кривой с постоянно уменьшающимся мгновенным радиусом от бесконечности при прямолинейном движении до конечного или минимального радиуса поворота, и дополнительно колёса задней полурамы обкатываются вокруг вертикального шарнира слома рамы. То есть, колёса переднего моста двигаются по касательной к дуге поворота мгновенного радиуса поворота 01, а колёса задней полурамы обкатываются вокруг другого мгновенного цента поворота 02;03;04 и т. д в зависимости от скорости продольного движения машины и скорости слома рамы (рис. 3). Задняя полурама Задняя полурама участвует одновременно в двух движениях, образуя новый кинематический центр поворота задней оси 02;03;04 и т. д. в зависимости от скорости движения всей машины. При сломе рамы и подтягивании задней полурамы к передней, возникают дополнительные перемещения задней полурамы вокруг вертикального шарнира слома рамы. Выбор полного угла слома рамы – для трактора К-700 – около 35° гидравлическим усилителем при среднем темпе воздействия на управляющий орган происходит за время около 1 сек. Это считается средней угловой скоростью поворота. Максимальная угловая скорость поворота достигается при ω =1÷1,5 рад/сек. Продольная скорость движения трактора в транспортном диапазоне – от 10 до 40 км/час. За 1 сек трактор проходит максимальное расстояние при 40 км/час расстояние около 11,1 м. При подтягивании задней полурамы к передней за это же время колесо задней полурамы проходит расстояние, при параметрах трактора К-700:
Касательная скорость обкатки колеса относительно шарнира складывания рамы:
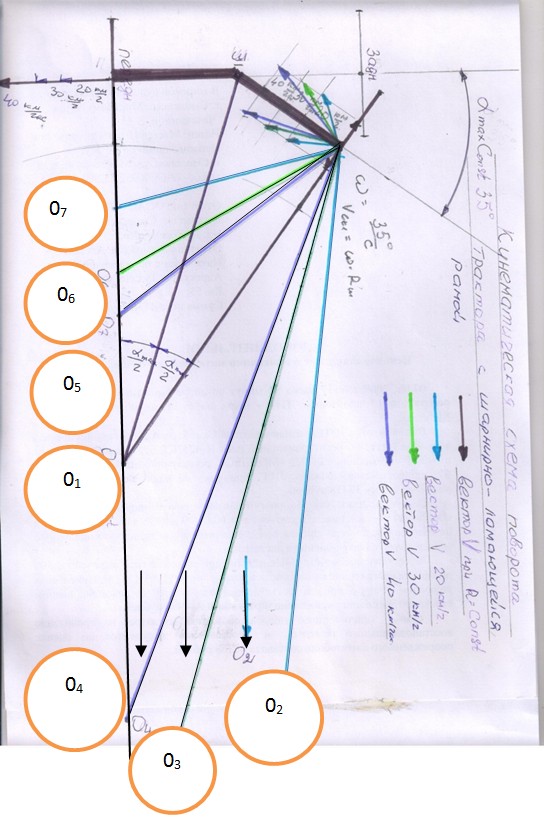
где 1,79 – длина задней полурамы трактора К-700 в м. При складывании векторов скоростей точка мгновенного кинематического центра поворота сместится из точки «01», определяемой углом слома рамы, в точку, определяемую вектором суммарной скорости колёс задней полурамы, направленным перпендикулярно к линии суммарной скорости заднего колеса – 02;03;04. При малых скоростях продольного движения угол направления перпендикуляра к вектору суммарной скорости задних колес может быть таким, что новый мгновенный центр поворота может оказаться на другой стороне машины. Так как возникает разворот задней полурамы вокруг вертикального шарнира поворота полурам, то это увеличивает наклон вектора суммарной скорости колеса, что приводит к новому мгновенному центру поворота только задней полурамы. Полурамы идут, как бы, на разрыв, разворачиваясь каждая вокруг своего кинематического мгновенного центра поворота. Шарнир слома рамы в этот момент испытывает ещё и ударную нагрузку. То есть, возникают такие обстоятельства, когда передняя полурама поворачивает вокруг одного мгновенного центра поворот – 01, а задняя полурама – вокруг другого, –02,03,04, увеличивая радиус поворота по отношению к повороту с постоянным радиусом поворота. Достигнув максимального угла слома рамы, трактор может двигаться по круговой траектории, когда обе полурамы вращаются вокруг одного кинематического центра поворота 01. Для выхода из процесса поворота уменьшается угол слома рамы. В этом случае, силы сопротивления выпрямления рамы действуют в противоположном направлении, чем при складывании полурам. В связи с этим, вектор суммарной скорости задней полурамы получает другое направление и трактор возвращается к прямолинейному направлению движения, вращаясь вокруг мгновенных кинематических центров поворота задней полурамы, уменьшающими радиус поворота задней оси по отношению к радиусу поворота, обусловленному только углом слома рамы, 05;66; 07. На рис. 3 представлена кинематическая схема положений мгновенных кинематических центров поворота задней полурамы, увеличиващие и уменьшающие мгновенные радиусы поворота задней полурамы, по отношению к радиусу поворота, обусловленного углом слома рамы. Как и у всех колёсных машин, процесс поворота машины в общем случае рассматривается в виде трёх последовательных этапов: Первый этап Вход в поворот связан с увеличением кривизны траектории – переходом от прямолинейного движения к криволинейному за счёт слома рамы и увеличения угла между осями полурам. Передняя полурама вращается вокруг мгновенного центра поворота 01. Задняя полурама участвует в двух видах движения: вокруг мгновенного центра поворота 01 и вращается вокруг вертикального шарнира, образуя новые мгновенные центры поворота задней полурамы 02; 03; 04, увеличивающими мгновенный радиус поворота. Второй этап Поворот с постоянным радиусом, характеризуется движением машины с постоянной кривизной с вращением обеих полурам вокруг мгновенного центра 01. Третий этап Выход из поворота заключается в уменьшении кривизны траектории – возвращении к прямолинейному движению с вращением передней полурамы вокруг мгновенного центра 01, и дополнительно, – задней полурамы вокруг мгновенных центров поворота 05; 06; 07, уменьшающими мгновенный радиус поворота. (В частном случае, второй этап может отсутствовать) Этапы «вход в поворот» и «выход из поворота» характеризуются движением передней и задней полурамы вокруг разных мгновенных центров поворота и поэтому шарнир слома рамы действуют ударные растягивающие усилия, вызывающие щелчки в шарнире. При выпрямлении рамы трактора, путём разворота задней полурамы в ней возникает движение не попутно общему движению трактора, а противодвижение. В этом случае, как бы тормозящая развёрнутая задняя полурама начинает подталкивать переднюю катящуюся полураму. Движение трактора в этом процессе напоминает движение земляного червяка. Это явление хорошо для трактора, попавшего в неудовлетворительные дорожные условия. Перемещением задней полурамы сначала в одну сторону, затем – в другую создаётся эффект выталкивания трактора из колеи. Как бы, задняя полурама выталкивает переднюю полураму. Таким образом, кинематическая особенность поворота тягачей с шарнирно-ломающейся рамой не позволяет тягачу производить поворот по траектории, задаваемой рулевым управлением, а создаёт условия для поворота с недостаточной управляемостью при входе в поворот, и наоборот, с избыточной управляемостью при выходе из поворота.
Рис. 3. Кинематическая схема поворота колёсной машины с шарнирно-ломающейся рамой с расположением мгновенных центров поворота Дополнительное обкатывание задней полурамы вокруг другого кинематического центра поворота, по сравнению с передней полурамой, было установлено автором в 1969 году. На итоговой научной конференции факультета механизации сельского хозяйства – кафедры тракторов и автомобилей 1969 года, автором были доложены результаты теоретических исследований управляемости трактора К 700. При этом было сообщено, что возможны случаи, когда мгновенные центры передней полурамы и задней полурамы не совпадали и даже могли располагаться по разные стороны трактора. Это было возможно при малых скоростях основного движения и высоких скоростях слома рамы. Коллектив кафедры, присутствующий на конференции, с большим скептицизмом отнёсся к представленным исследованиям. Однако результаты исследования были всё-таки опубликованы. На конференции присутствовали специалисты Харьковского тракторного завода, которые занимались разработкой трактора Т-125, предшественника трактора Т-150К. В 1970 году на такой же конференции представитель Харьковского завода подтвердил вероятность вращения передней и задней полурам вокруг разных кинематических центров поворота, сославшись на работу автора 1969 года. Сотрудники кафедры, участвующие в конференции 1969 году, в 1970 году, публично принесли автору свои извинения на конференции, и диссертационная работа автора была успешно завершена[2]. Литература: 1. Справочник по тракторам Т-150 и Т-150К. // А; А. Бугара, Н. Н. Ватуля, Л. А. Ванштейн и др. – Харьков: Прапор, 1975. – 369 с.. 2. Теория и конструкция автомобиля. / В. А. Иларионов, М. М. Морин, Н. М. Сергеев и др. – М,: Машиностроение, 1979. – 303 с. 3. Никонов Н. Н. Трактор Кировец К-701. – М.: Высшая школа, 1974. – 319 с. 4. Тарасик В. П. Теория движения автомобиля. – СПб.: БХВ–Петербург, 2006. – 476 с. 5. Тишин Б. М. Исследование управляемости колёсного трактора 4х4 с шарнирно-ломающейся рамой на повороте на примере трактора К-700. Дисс. … канд. техн. наук. – Л: Ленинградский сельскохозяйственный институт, 1972. 6. Фаробин Я. Е. Теория поворота транспортных машин. – М,: Машиностроение, 1970. – 124 с. [1] Здесь и далее рисунки автора. [2] Пользуясь случаем, автор выражает благодарность доценту кафедры тракторы и автомобили Ленинградского сельскохозяйственного института Н. И. Кочурову за принципиальную позицию в отношение диссертационной работы автора. Комментарии (0)
Пока никто не оставил комментарий.
| |||||
|
| |||||
|
| |||||
|
| |||||
|

|
| Выполняется запрос |